Kesalahan Umum dalam Navigasi Kapal yang Harus Dihindari
1. Mengandalkan Teknologi Secara Mutlak
Banyak navigator modern bergantung sepenuhnya pada GPS, radar, atau sistem elektronik lainnya. Namun, teknologi bisa gagal—misalnya akibat interferensi GPS atau jamming seperti yang terjadi di Selat Hormuz, yang menyebabkan tabrakan dan kebakaran kapal besar.
Solusi: Tetap siapkan alat navigasi tradisional seperti kompas, peta, dan visual lookout sebagai cadangan.
2. Kesalahan dalam Pemahaman dan Pengaturan ECDIS
ECDIS (Electronic Chart Display and Information System) kini umum digunakan, tapi kesalahan pengaturan menjadi penyebab hingga 45% kecelakaan di perairan dangkal. Salah satunya karena skala peta yang salah, alarm keselamatan tidak aktif, atau fitur peringatan tidak dikonfigurasi dengan benar.
Solusi: Pastikan officer of the watch (OOW) terlatih dan rutin melakukan cross-check dengan radar dan visual.
3. Bingung Mengenai Tanda Navigasi (Buoy)
Kesalahan dalam membaca warna atau bentuk buoy sering terjadi, apalagi saat berpindah area geografis dengan peraturan berbeda.
Solusi: Kuasai aturan internasional (misalnya "Red Right Returning") dan selalu verifikasi tanda lewat peta atau referensi lokal.
4. Kesalahan Komunikasi dan Pelaporan Posisi
Pelaporan posisi kapal yang salah atau tidak akurat bisa menyebabkan kecelakaan laut besar, karena kapal lain tidak memiliki informasi posisi yang dapat diandalkan. Begitu juga kesalahan dalam menyampaikan sudut kemudi (rudder angle) bisa menyebabkan perubahan arah yang membahayakan.
Solusi: Verifikasi pesan radio (VHF) dan pastikan komunikasi antar kru berjalan jelas dan sistematis.
5. Kompas Tertarik (Magnetic Deviation)
Kompas dapat memberikan arah yang keliru jika ada magnet lokal atau induksi magnetik di kapal—dikenal sebagai magnetic deviation. Tanpa kalibrasi, sudut kompas bisa melenceng dan memicu navigasi tidak akurat.
Solusi: Lakukan adjust kompas secara berkala menggunakan kompensator, dan bandingkan dengan gyrocompass atau navigasi satelit (GPS) untuk mengidentifikasi deviasi.
6. Navigasi Martim Tua: Dead Reckoning dan Kondisi Alam Tak Terkira
Metode seperti dead reckoning, mengestimasi posisi berdasarkan arah dan kecepatan sebelumnya, masih digunakan. Namun, kesalahan estimasi bisa bertambah seiring waktu—terlebih jika ada arus atau cuaca ekstrem seperti yang terjadi pada Honda Point Disaster (1923), di mana kapal kapal menabrak karang karena kalkulasi posisi yang meleset. Gunakan banyak pengecekan posisi, seperti menggunakan RDF, fathometer, atau menurunkan kecepatan saat kondisi tidak jelas.
7. Manusia, Masih Menjadi Faktor Utama
Penelitian menunjukkan bahwa sekitar 89–96% kecelakaan navigasi diakibatkan oleh kesalahan manusia—mulai dari salah perhitungan, kehilangan situasi, hingga multi kesalahan sekaligus. Solusi: Jadikan passage planning (perencanaan perjalanan) secara menyeluruh dan brief kru sebelum pelayaran sebagai standar; selalu sediakan redundansi alat dan prosedur untuk mencegah kesalahan beruntun.
Ringkasan Kesalahan & Solusinya
| No | Kesalahan Umum | Solusi Utama |
|---|---|---|
| 1 | Over-reliance teknologi | Gunakan navigasi manual sebagai cadangan |
| 2 | Salah atur ECDIS | Training & cross-check dengan radar/visual |
| 3 | Kesalahan membaca buoy | Kuasai aturan dan verifikasi lokal |
| 4 | Komunikasi posisi yang tidak akurat | Pastikan komunikasi radio jelas dan diverifikasi |
| 5 | Kompas mengalami deviasi magnetik | Kalibrasi kompas secara rutin |
| 6 | Dead reckoning tak akurat | Banyak pengecekan posisi & kurangi kecepatan |
| 7 | Faktor manusia | Perencanaan matang & redundansi prosedural |
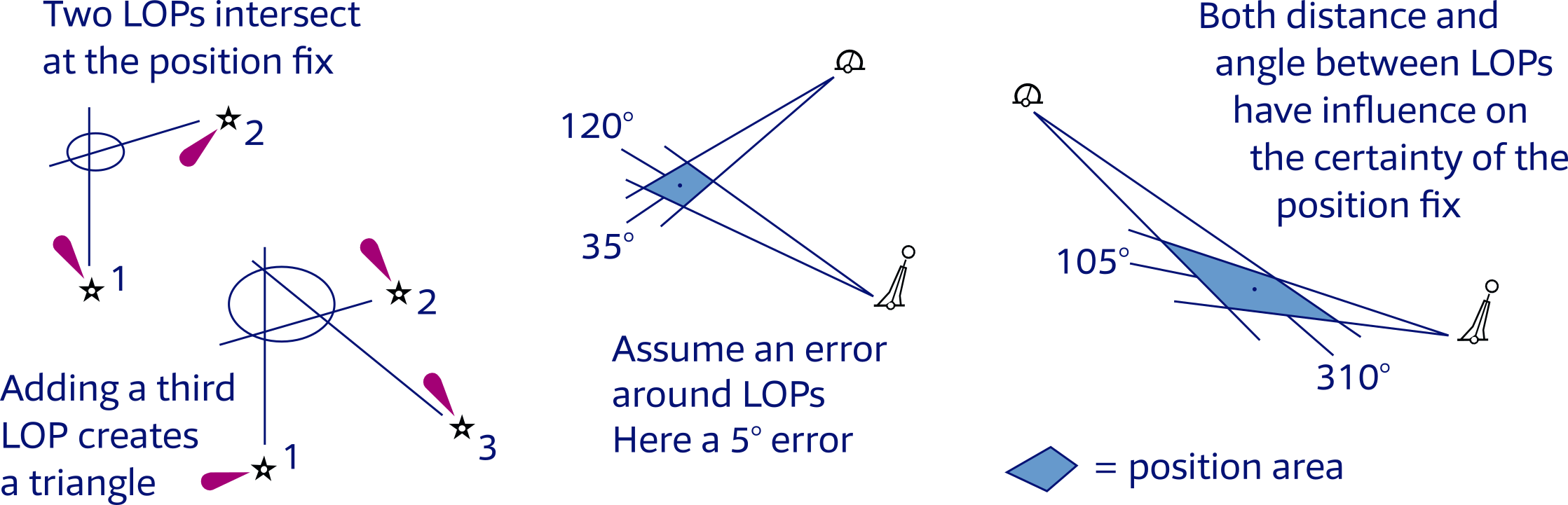
Gambar di atas menggambarkan perbaikan sudut perhitungan posisi (LOP) dalam navigasi klasik — menunjukkan betapa pentingnya distribusi sudut yang baik untuk akurasi navigasi. Visual ini sangat membantu memahami apa yang terjadi saat terjadi kesalahan perhitungan posisi.